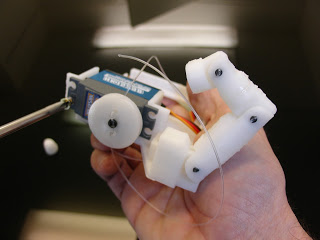
Montage du testeur de doigt
Vous allez assembler votre doigt sur un petit servo moteur et l'installer sur un support test.
Voici la liste des pièces et le nombre d'empreintes nécessaires pour 1 Finger Starter :
1x Index des doigts
1x servo moteur et son support
1x servo-poulie
Téléchargez les fichiers STL nécessaires.
Imprimer vos pièces : ATTENTION CONFIGURATION DE L'IMPRESSION ( rubrique didactitiels pour préparer vos fichiers pour impression)
|
Imprimante 3D : FLSUN V400 Matériau PLA Remplissage 100% Hauteur de couche 0,15 Epaisseur de la paroi 2mm Extension horizontale -0,15 Pas de support Adhérence ( Bordure ) Température plateau 60° Température d'impression 210 ° |
|
Fichiers STL (impression 3D) |
index
|
majeure
|
ring finger
|
auriculaire
|
||
|
Servo poulie |
 |
|||||
Cela va être intéressant !!
Voyons maintenant ce que nous avons imprimé et comment nous allons le faire.
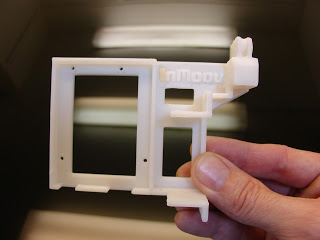
1) Repercez les trous des charnières latérales avec une perceuse de 2 mm puis 2.5mm et enfin 2.8mm

2) Les trous intérieurs des charnières doivent être repercés avec un foret de 3 mm.

Notez que les parties des doigts sont toutes différentes il faudra faire trés attention lors de l'assemblage.

Si vous avez des impressions PLA, une colle époxy à deux composants est très bien mais vous pouvez également utiliser de la colle Zap-A-Gap.
3) Prenez donc la partie 1 et la partie 2 et collez-les ensemble. ( attention au sens et à l'orientation des pièces)

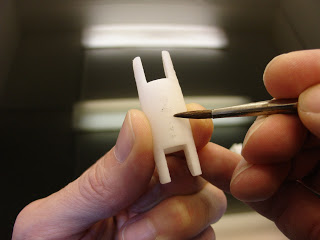
4) Collez ensemble les parties 3 et 4.
Ne collez pas encore les parties 5 et 6

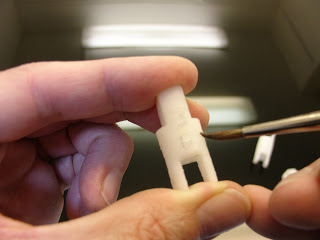
5) Prenez un morceau de votre filament de 3 mm
6) Poussez-le dans le trou en assemblant les pièces 1/2 à 3/4 ensemble.
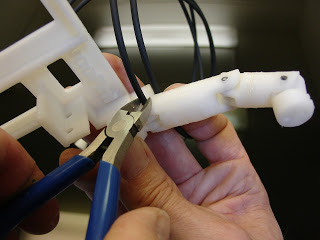
7) Une fois qu'il atteint l'autre côté, coupez le filament avec une pince.
8) Faites la même opération avec les parties 3/4 à 5
9) Assemblez le doigt à la partie principale avec la même technique.
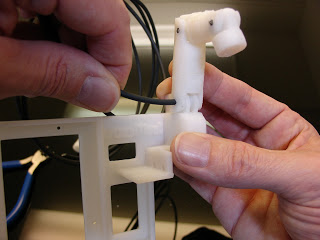
Nous avons maintenant un doigt qui devrait bouger librement.
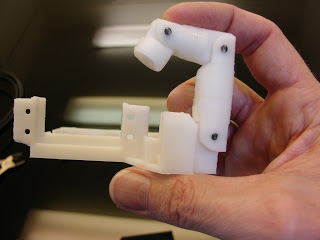
Vous devriez avoir quelque chose comme ça. Il devrait pouvoir se plier librement selon cet angle.
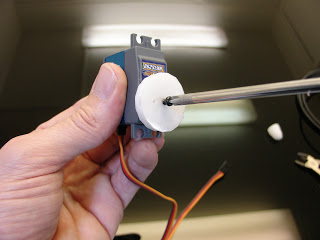
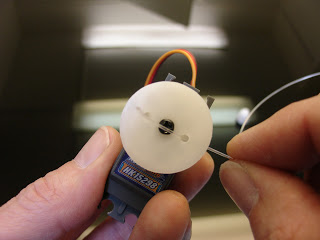
10) Voyons maintenant le servo-moteur
Montez, Vissez le « Servo poulie » sur votre servo, les deux petits trous doivent être sur vos points extrêmes.
Il est temps de fixer le servo à la base.
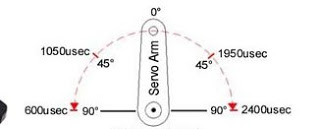
Vérifiez que votre servo est à son point zéro arbitraire.
Nous allons trouver un point zéro arbitraire sur le servo. Tourner à la main l'actionneur au maximum à gauche, noter jusqu'où il va. Faites de même vers la gauche et notez jusqu'où il est allé. Ces deux points sont les positions extrêmes de votre servo, au milieu de ces deux points décidez où se trouve le point zéro arbitraire.
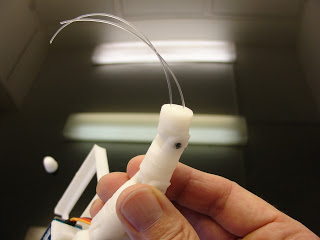
11) Prenez un morceau de cable d'environ 50 cm de long. Passez votre cable dans un trou.
Passez maintenant l’autre extrémité de la tige dans le deuxième trou.
Assurez-vous simplement de ne pas inverser votre tige, elle doit toujours être sur le dos du doigt.
Passez maintenant la deuxième tige à l’intérieur du doigt.
Vérifiez que votre servo est à son point zéro arbitraire.

Enroulez un peu le doigt et faites quelques nœuds entre les deux fils.
Lorsque vous tournez « sevo poulie» à la main, vous devriez pouvoir mettre le doigt dans cette position. Doigt totalement tendu.
Maintenant, coupez les tiges.
Essayez de déplacer le doigt en faisant tourner « servo poulie », il doit bouger librement sans se verrouiller.

Votre doigt est prêt pour l'étape de programmation
Dernière modification : 20/11/2023 11:07
Catégorie : -
Page lue 78 fois