Comment faire surveiller un espace ?
|
e-vigilante est un robot dédié à la surveillance interne des entrepôts et des sites industriels. Ce robot réduit les coûts et les risques associés aux risques de sécurité tout en optimisant la surveillance dans les sites surveillés. Entrez dans l’élite de la sécurité : Mobile, autonome et polyvalent, e-vigilante effectue des rondes automatisées et prévient immédiatement la personne en charge de la surveillance du site lors de la détection d’un incident. Cette dernière peut alors prendre la main à distance et en temps réel sur le robot, afin d’effectuer une levée de doute grâce à la caméra, au micro et aux haut-parleurs intégrés. La surveillance active et réactive : Oubliez les contraintes des systèmes de surveillance fixes et découvrez la surveillance mobile. e-vigilante intègre les dernières technologies de la sécurité et leur permet d’évoluer en toute autonomie sur votre site suivant vos pré-requis. Plus besoin de télé-opération, plus d’angles de vue précis à définir lors de l’installation, plus d’angles morts à cause d’une palette oubliée… Avec e-vigilante vous ne perdez aucune seconde lors d’une intrusion car vous disposez d’un retour au plus proche des incidents rencontrés, couplé à un système de suivi des intrus. |
 |
S’exprimer à l’écrit
Rédiger réponses et trace écrite avec le bon vocabulaire
Utiliser l’algorithmique et la programmation
Modifier / créer un script et vérifier son exécution
Travailler en groupe
1°) En utilisant le texte ci-dessus et la vidéo de présentation du robot e-Vigilante, réponds aux questions sur ta fiche.
2°) Simulation avec le robot mBot2 et son capteur à ultrasons : (durée : 30 minutes)
Voici le bloc que vous allez utiliser ( il doit être couplé avec un operateur, ici le bloc inferieur à)

Phase 1 : détecter un obstacle et l’éviter
- En t’aidant de l’algorithme écrit lors de la partie précédente, complète le programme sur ta fiche pour que le robot mBot2 puisse détecter et éviter (il fait demi tour) un obstacle à 15 cm.
- Lance le logiciel mBlock5 .
- Modifie le fichier à l’aide des blocs de programmation comme tu l’as indiqué sur ta fiche
- Allume le robot, connecte-le à l’ordinateur et implante le programme en suivant les instructions dans le didactitiel.
- Déconnecte le robot, débranche-le, éteins-le.
- Installe le robot ainsi qu’un obstacle.
- Teste le programme.
- Que constates-tu ?
NE PAS OUBLIER D'ENREGISTRER VOTRE PROGRAMME SOUS LE NOM "Ultrasons"
Phase 2 : tester les capacités du capteur à ultrasons
Travail :
Vous allez réaliser une expérimentation pour savoir quelle distance maximal et quelle distance minimal que le capteur est capable de détecter.
- Réfléchissez et proposer un protocole ( une méthode d'investigation), à compléter sur votre fiche travail
- réaliser votre expérience et noter vos résultats sur votre fiche travail
- Rédiger une conclusion
| Fiche travail | ||
 |
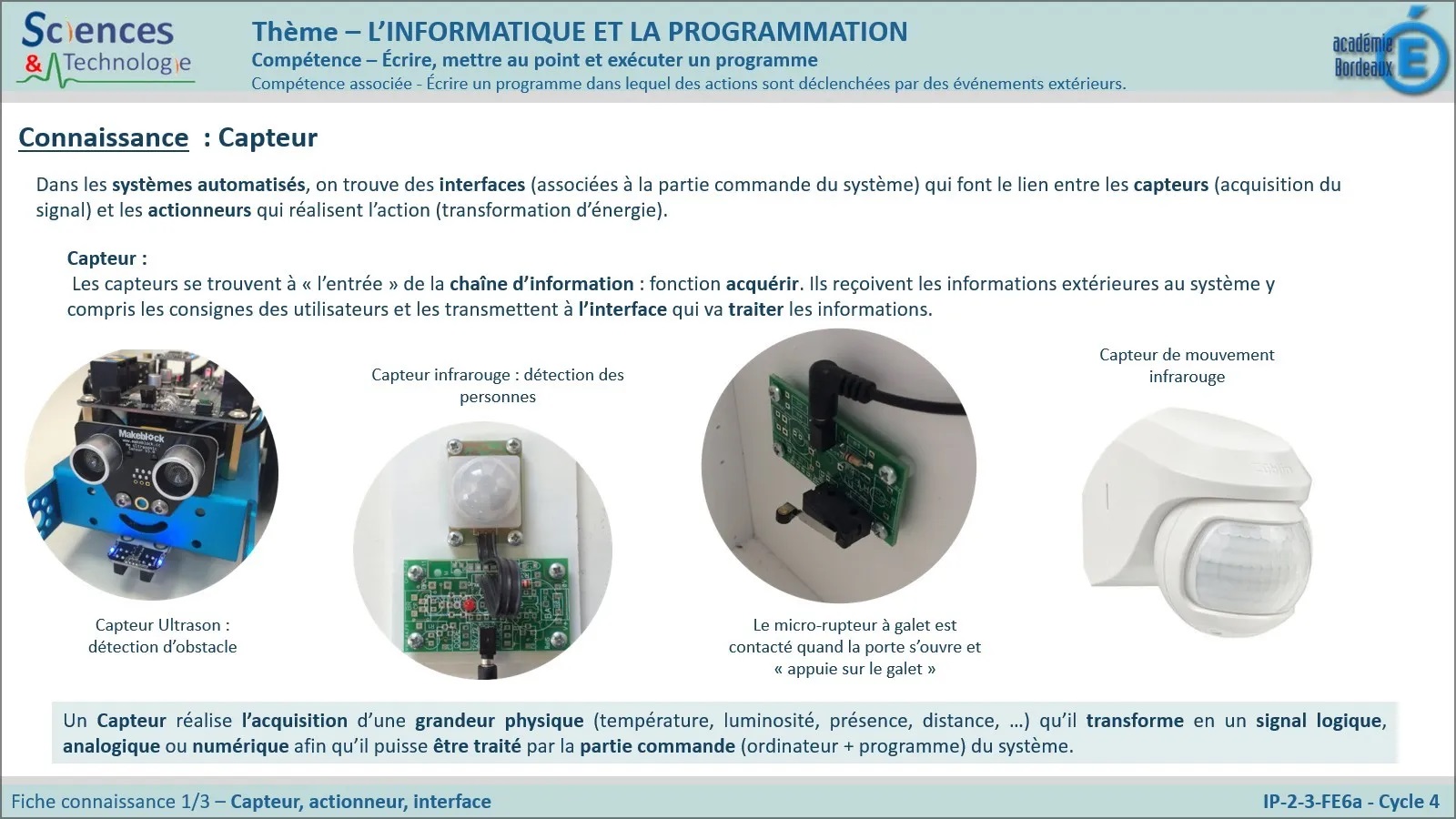
Capteur
Dernière modification : 22/02/2023 12:27
Catégorie : -
Page lue 131 fois